Acquisition Platform
 Multiple sensors are equipped on our platform to collect complementary
data, so as to enable solutions base on the common sensors used in
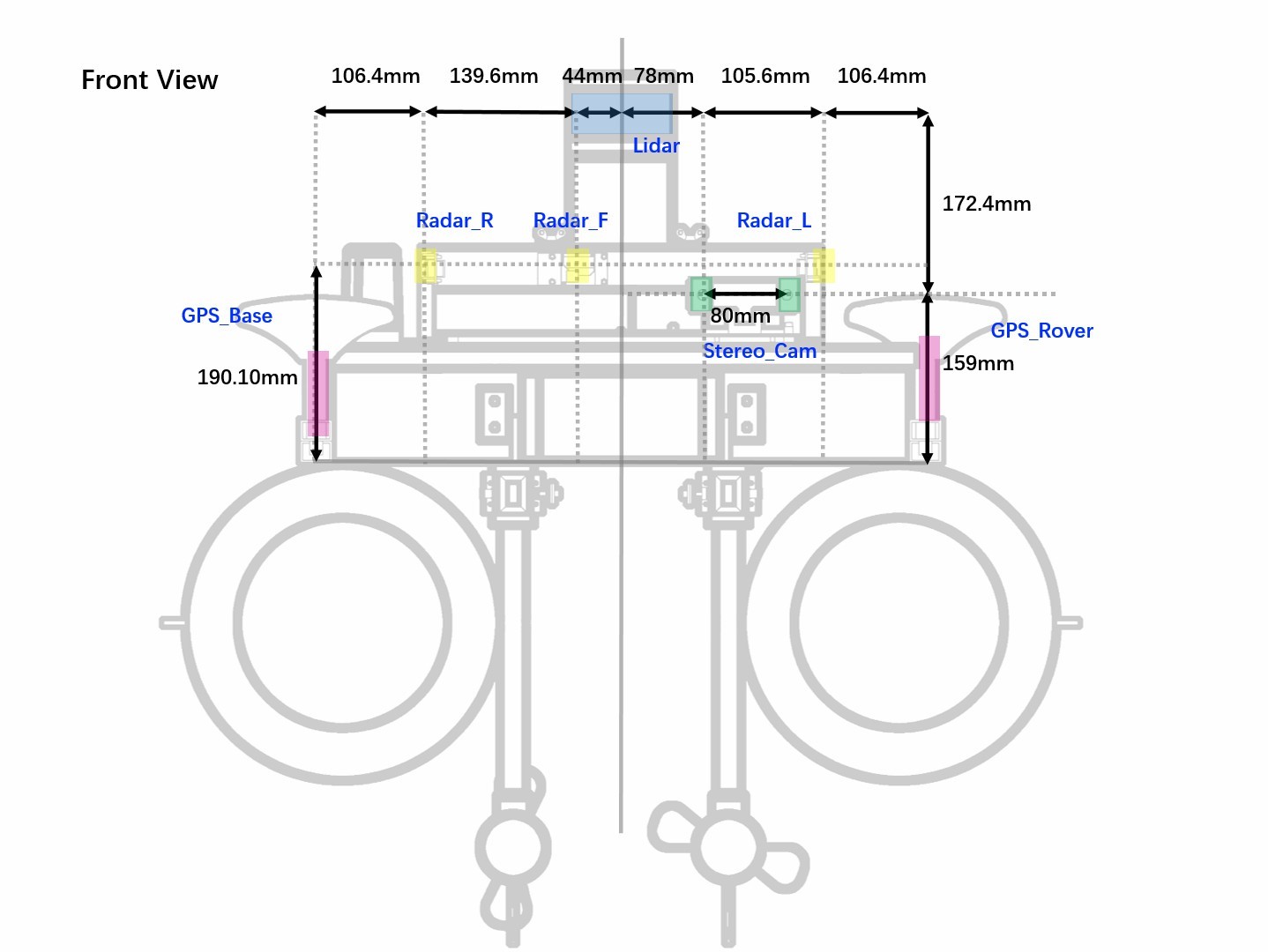
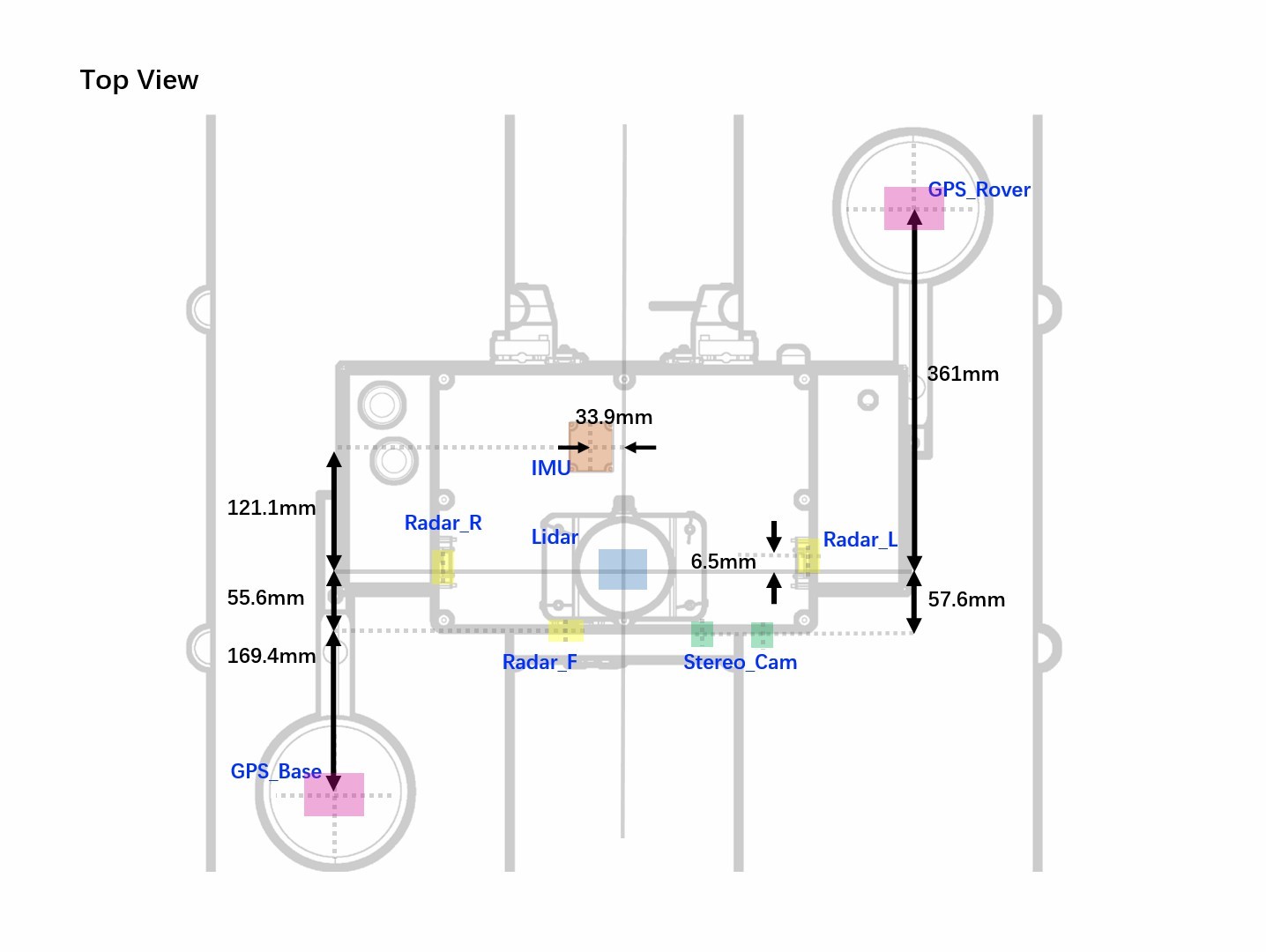
autonomous driving. The sensors include: a 16-beam Lidar, a stereo
color camera, three millimeter-wave radars, an INS (GPS and IMU). The
image of the platform and the sensor location diagram are shown here.
Multiple sensors are equipped on our platform to collect complementary
data, so as to enable solutions base on the common sensors used in
autonomous driving. The sensors include: a 16-beam Lidar, a stereo
color camera, three millimeter-wave radars, an INS (GPS and IMU). The
image of the platform and the sensor location diagram are shown here.
 陕公网安备61019002002774
陕公网安备61019002002774